The populateMatrix method of the OrientationSensor interface populates the given target matrix with the rotation matrix based on the latest sensor reading. The rotation matrix is shown below.
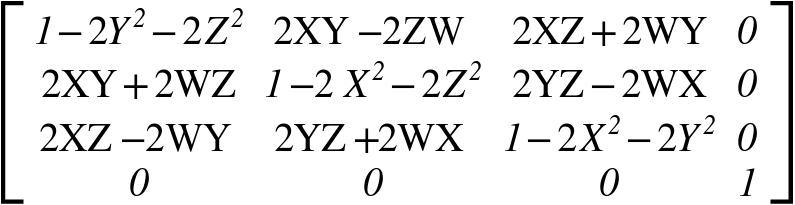
where:
- W = cos(θ/2)
- X = Vx * sin(θ/2)
- Y = Vy * sin(θ/2)
- Z = Vz * sin(θ/2)
If a feature policy blocks use of a feature it is because your code is inconsistent with the policies set on your server. This is not something that would ever be shown to a user. See Feature-Policy for implementation instructions.
Syntax
orientationInstance.populateMatrix(targetMatrix)
Because OrientationSensor is a base class, populateMatrix may only be read from one of its derived classes.
Parameters
- targetMatrix
- TBD
Return value
Example
// TBD
Specifications
| Specification | Status | Comment |
|---|---|---|
| Orientation Sensor The definition of 'populateMatrix' in that specification. |
Candidate Recommendation | Initial definition. |
Browser compatibility
The compatibility table in this page is generated from structured data. If you'd like to contribute to the data, please check out https://github.com/mdn/browser-compat-data and send us a pull request.
| Desktop | Mobile | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
populateMatrix | Chrome Full support 69 | Edge Full support ≤79 | Firefox ? | IE ? | Opera Full support 56 | Safari ? | WebView Android Full support 69 | Chrome Android Full support 69 | Firefox Android ? | Opera Android Full support 48 | Safari iOS ? | Samsung Internet Android Full support 10.0 |
Legend
- Full support
- Full support
- Compatibility unknown
- Compatibility unknown